Library · 7 min
Goes deeper from Iteration and control
On this page8
Autonomous loops — when and when not
Autonomy isn't a feature you turn on. It's a posture you take with the agent — the agent runs, you don't watch every step, the work moves while you do other things.
Sometimes that posture is leverage. Sometimes it's the agent confidently polishing the wrong thing forty times in a row.
The skill is knowing which situation you're in before you walk away from the keyboard.
Four flavors of autonomy
You can hand the agent more rope four ways.
- The loop. Same task, run on an interval or self-paced until a condition is met.
/loop 5m /check-deployreruns every five minutes./loop /fix-typechecklets Claude self-pace toward a tests-pass condition. The conversation persists; each turn knows what the previous turn did. - Goal mode.
/goal <condition>sets a completion condition and Claude keeps working across turns until it's met — in interactive,-p, and Remote Control. A live overlay tracks elapsed time, turn count, and token spend. You state the outcome; Claude decides when it's done. Useful when the finish line is clear but the path length isn't. - Auto mode. A permission posture (covered in chapter 4) that lets Claude take many small actions without per-action approval. Different shape from the loop — same conversation, no scheduled re-entry, but Claude is allowed to fan out aggressively inside it. Parallel tool calls are now more resilient here: a failed Bash command no longer cancels other calls in the same batch — each returns its result independently.
- Dynamic workflows. Use an explicit phrase like
workflow:or "run a workflow" — highlighted in purple shimmer — and Claude orchestrates work across tens to hundreds of agents in the background, fan-out at a scale the other three shapes can't reach. A bare mention of the word alone won't trigger it; explicit phrasing is required. Run/workflowsto view your runs.
All four let the agent move without you. They fail differently.
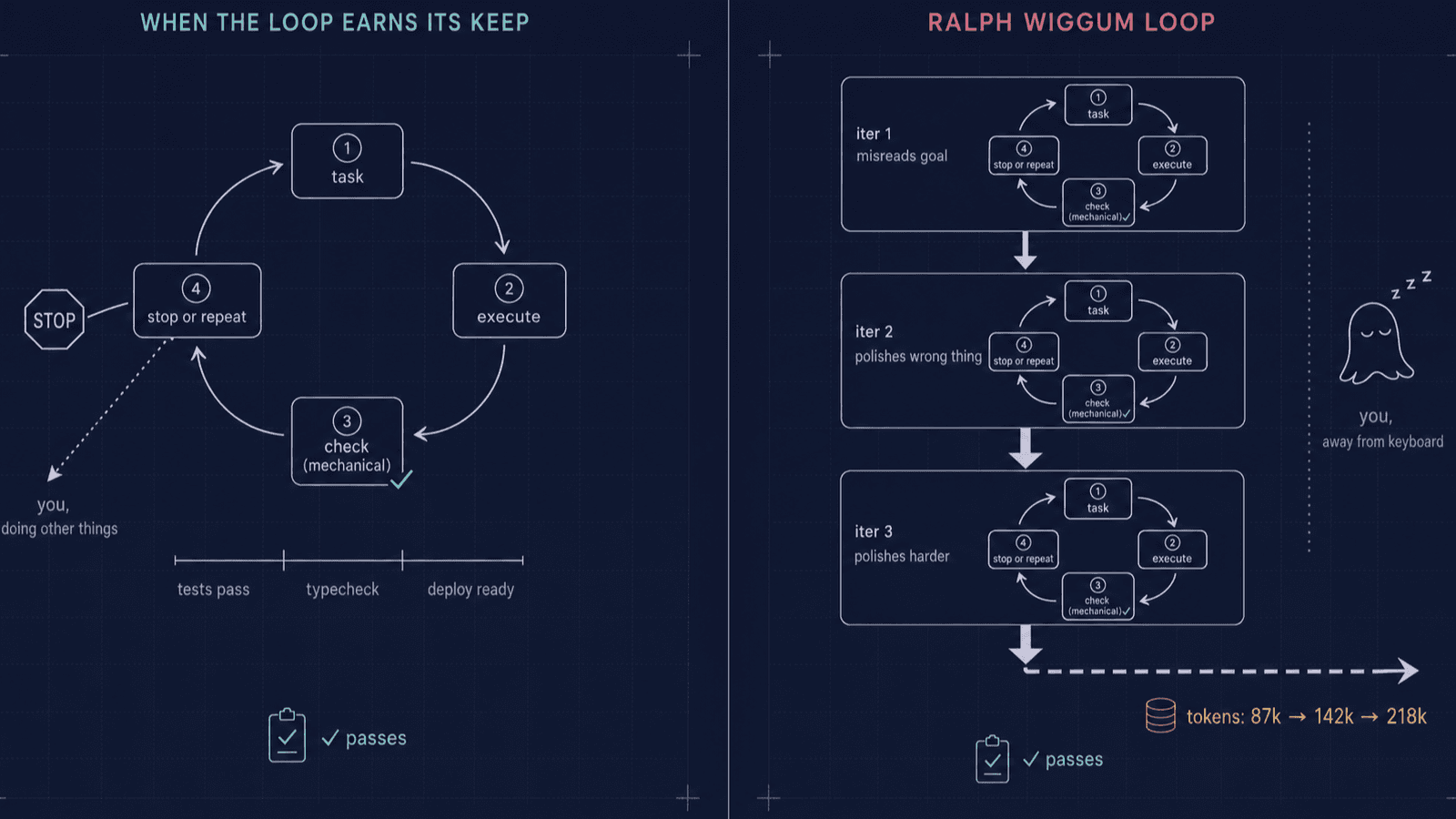
When the loop earns its keep
The loop is a fit when success is mechanical — when "is it done?" has an answer Claude can check on its own.
- A type-check exit code.
- A test suite turning green.
- A linter producing zero violations.
- A deploy log saying
Ready. - A long fan-out: "go through these 200 files and apply the same transform; verify each one builds before moving on."
Concretely, the prompt looks like:
/loop run pnpm typecheck; if it fails, fix the smallest failure and try again; stop when it passes or you've made 10 attempts
That's a loop with a mechanical success criterion (pnpm typecheck exit code), a bounded action ("smallest failure"), and a stop condition (success or 10 attempts). Walk away. Come back to either green or a tractable handoff.
The Ralph Wiggum loop
Geoff Huntley named the failure mode: the agent gets confidently stuck on a wrong path and every iteration just polishes the wrong thing harder. Named after Ralph from The Simpsons, who also commits earnestly to bad ideas.
Three flavors:
| Failure | What it looks like | Why the loop amplifies it |
|---|---|---|
| Confident-wrong amplification | Iteration 1 misreads the goal. Iterations 2–N "improve" the misread version. | Each turn reads the previous turn's output as ground truth. Wrong premise, compounding. |
| Boundary drift | "Fix typecheck" turns into rewriting unrelated modules to dodge the type errors. | Without a hard scope, the agent treats every adjacent file as fair game. |
| Hidden cost spiral | You're afk. The loop runs 30 iterations chasing a problem it can't solve. | No human in the loop means no "wait, this isn't working" interrupt. Tokens accrue. |
The tell that you're in a Ralph loop: each iteration looks more polished than the last, but the diff is moving away from anything a human reviewer would want.

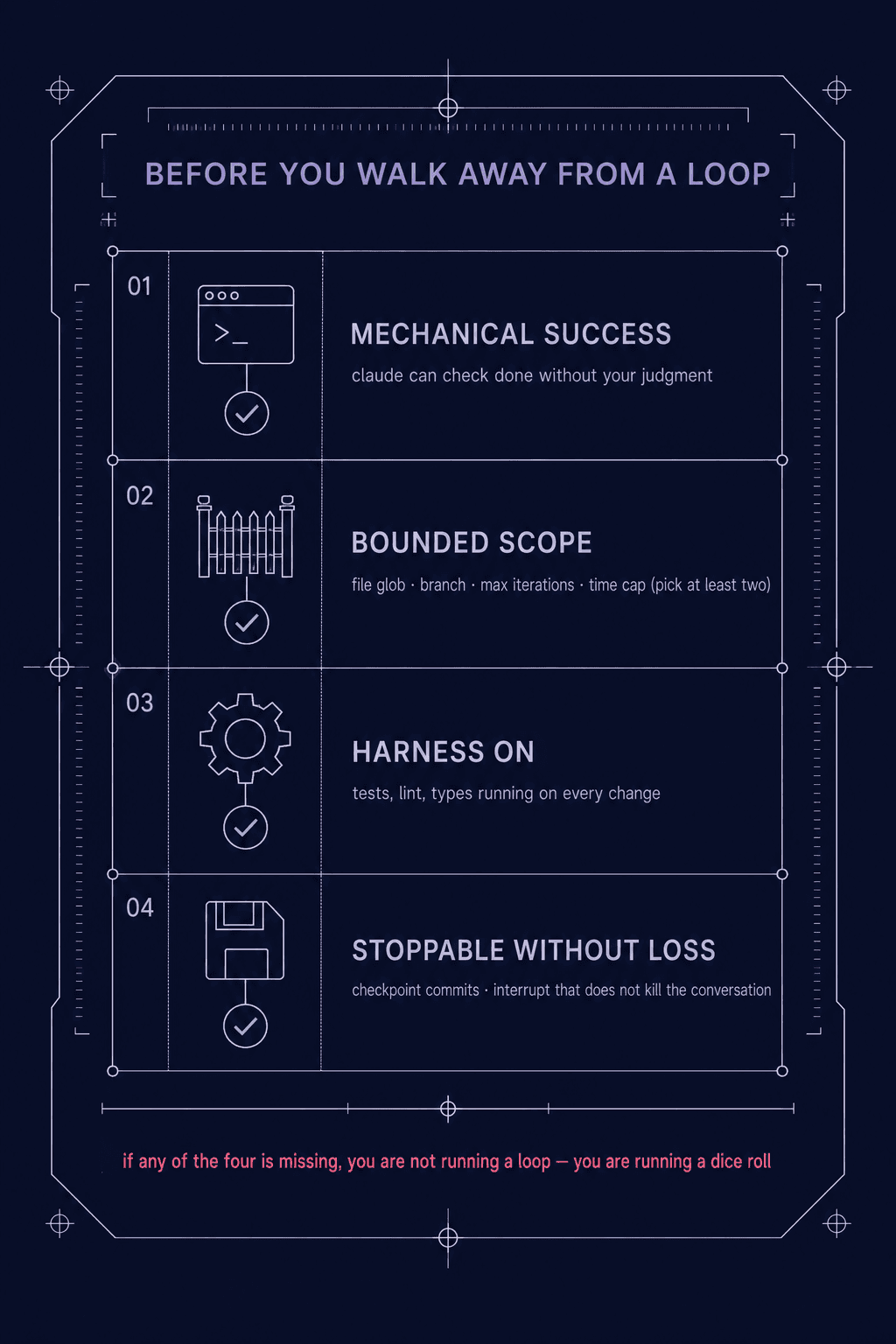
Pre-flight checklist
Before you walk away from a loop, four checks. Cheap to run, expensive to skip.
- Is success mechanical? Can Claude check "done" without your judgment? If "done" needs a human to taste it, the loop will loop forever.
- Is the scope bounded? A file glob, a branch, a max-iteration count, a time cap. Pick at least two.
- Is the harness on? Tests, lint, types running automatically on every change. Without it, autonomy is hope. The harness is what catches a Ralph loop in iteration 2 instead of iteration 30.
- Can you stop without losing state? Checkpoint commits, persistable progress, an interrupt that doesn't kill the conversation. If stopping means re-deriving everything, you'll let the loop run too long out of sunk-cost.
If any of the four is missing, you're not running a loop — you're running a dice roll.
Pinned sessions and check 4. In claude agents, Ctrl+T on a background session pins it. Pinned sessions stay alive when idle, restart in place when Claude Code updates, and are shed under memory pressure only after non-pinned ones. Pin the session your loop is running in.
The harness is the precondition
Chapter 8 — Next steps is the chapter on harness building. It's not optional reading for autonomous loops; it's the precondition.
A harness without autonomy is a careful manual practice — fine, slow, sustainable. Autonomy without a harness is unmonitored hope. The agent is moving fast in a direction nothing checks. The combination — autonomy on top of a harness — is where the real leverage is. Tests catch the regression before iteration 3. Lint catches the boundary drift. The harness is the ground truth the agent is iterating against.
If you find yourself reaching for /loop and you don't have tests on the surface you're touching, write the test first. Then loop.
What walking away actually buys
The point isn't "do less work." It's redirect your attention.
Mechanical fan-out — applying the same shape across many files, fixing every instance of a deprecation warning, regenerating snapshots — is work that adds no value when you do it and no value when the agent does it either. The loop just moves it off your time.
What you actually want your attention on: intent, design, judgment, the calls only a human can make. The loop runs the part of the work where being there doesn't help, so you can be present for the part where it does.
That's the trade. It only pays if the part you walked away from really was mechanical.
Anti-pattern: the junior dev who never sleeps
The seductive failure mode: the loop is "working" — the agent is moving, the diff is growing, things compile. So you let it run.
But "working" and "doing the right thing" are not the same. A loop that fast-tracks the wrong solution is worse than no loop at all, because by the time you check, the diff is too large to throw away cheaply.
The cheaper move: short loops with explicit stop conditions, then a human review, then another short loop. Not "set it and forget it." More like "set it, glance at it, course correct, set it again." Autonomy in increments, not autonomy as a vibe.
How this connects to the spine
Chapter 4 — Iteration and control introduces auto mode and the basic shape of letting Claude move without per-action approval. This entry is the next layer — when to extend that posture into a scheduled or self-paced loop, and when not.
Chapter 6 — Ecosystem is where skills like /loop, /proactive, and /work get installed and configured. Build the harness first; install the autonomy second.
Chapter 8 — Next steps is the harness. Read it before you ever walk away from a running loop.